|
|
|
Cientistas trabalham na criação 'do robô mais veloz do mundo' | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
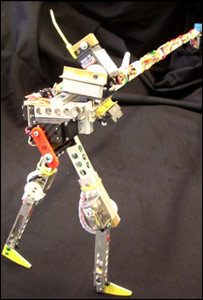
Cientistas europeus estão desenvolvendo um robô que dizem ser o "mais veloz do mundo". O "Runbot", como o equipamento está sendo chamado, é de estatura pequena, bípede e pode se locomover a uma velocidade equivalente a três vezes o tamanho de sua perna por segundo. Os cientistas, que apresentaram as recentes descobertas na revista Biologia e Ciência Computacional, estão usando uma tecnologia baseada em teorias do fisiologista russo Nikolai Bernstein desenvolvidas no início do século passado. Para Bernstein, a capacidade de andar não estaria sob total controle do cérebro, e sim dos "circuitos locais" nas pernas, que seriam os responsáveis pelos comandos e fariam grande parte do trabalho no ato da locomoção. Ainda segundo o neurofisiologista, o cérebro só estaria envolvido no processo da locomoção quando os parâmetros entendidos como normais são alterados, como a mudança de um tipo de terreno para outro. As teorias de Bernstein, que ressaltam o papel de outras parte do corpo para a locomoção em detrimento do cérebro, estão sendo aproveitadas pelos cientistas no desenvolvimento do Runbot. Sensores Segundo os pesquisadores, o primeiro passo na construção do robô foi a criação de uma estrutura biomecânica que capacitaria o Runbot a andar em superfícies planas ou na descida de uma ladeira, onde seria impulsionado pela gravidade, mantendo-se ereto ao mesmo tempo. Os passos do robô seriam controlados por reflexos recebidos por sensores nas juntas e nos pés da máquina, e por um acelerômetro, que monitoraria sua velocidade. Esses sensores, então, transmitiriam a informação para os "circuitos locais", que ao analisar a informação, fariam ajustes aos passos do robô em tempo real. As informações emitidas pelos sensores seriam constantemente criadas pela interação do Runbot com o chão, fazendo com que ele adaptasse seus passos às mudanças no terreno. À medida que o robô vai andando, os circuitos de controle garantiriam que as juntas não se estiquem demais, estimulando o próximo passo. Andar como humano "Durante metade do tempo em que estamos nos locomovendo, não estamos fazendo nada, apenas nos impulsionando para frente, como em um salto", afirma o professor Florentin Woergoetter, da Universidade de Gottingen, na Alemanha, um dos envolvidos no estudo. "No caso do robô, a dificuldade está nisso, em provocar esse movimento no momento e no tempo certo, calculado em milisegundos, e ainda na medida correta para que o robô não caia pra frente e quebre", acrescenta. Além de Woergoetter, o projeto, que já dura quatro anos, ainda conta com a participação de outros três cientistas. "O Runbot se locomove de forma diferente dos outros robôs, que andam passo a passo, calculando cada ângulo. Isso pode ser administrado pela engenharia, mas é muito desajeitado", diz Woergoetter. "Nenhum humano anda assim. Nós queremos que o nosso robô ande como humano." Para os cientistas, o desafio agora é aumentar o tamanho do Runbot e melhor prepará-lo para antecipar situações como mudanças no terreno. |
NOTÍCIAS RELACIONADAS  Japão faz torneio de futebol para robôs; assista Japão faz torneio de futebol para robôs; assista02 julho, 2007 | BBC Report Robôs participam de 'olimpíada' nos EUA; assista15 junho, 2007 | BBC Report EUA desenvolvem robô para resgatar soldados feridos 07 junho, 2007 | BBC Report Japoneses criam robô com expressões faciais; veja vídeo05 de junho, 2007 | Notícias Polícia da Grã-Bretanha lança robô-espião aéreo21 maio, 2007 | BBC Report LINKS EXTERNOS A BBC não se responsabiliza pelo conteúdo dos links externos indicados. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||